Building Safe, Trustworthy Driverless Cars
How safe is safe? This seemingly simple question is a topic of frequent discussion within Aptiv’s autonomous mobility division. I’m proud of Aptiv’s excellence in driverless technology—starting from our R&D roots at MIT and Carnegie Mellon, through our present-day operation in Las Vegas of the largest commercial self-driving mobility service in the world, which has provided more than 60,000 self-driving rides to passengers on the Lyft network. Despite the significant technological and commercial milestones we’ve achieved, we continue to improve our technology, processes, and operational practices to ensure that our systems are as safe as possible.
Why autonomous vehicles?
It’s worth remembering why we’ve embarked on our mission to develop fully autonomous vehicles. 1.3 million individuals lose their lives every year due to crashes around the world, and in the United States we’re experiencing a startling rise in the incidence of crashes and pedestrian fatalities. Passive safety features—which have led to reduced crash rates over the past several decades—have achieved full market penetration, and are thus unlikely to yield significant safety gains. While active safety features are experiencing increasing adoption and promise to result in improved road safety, we at Aptiv are looking toward the next generation of technology—fully autonomous vehicles—as an opportunity to innovate in the name of saving lives.
Leading the definition of autonomous safety
Developing and deploying autonomous vehicles is not the “race to the finish line” that has sometimes been portrayed in the media. At Aptiv, the autonomous vehicle development process is a journey, focused on building a driverless system
that is safe, reliable, efficient, and economical.
Developing a safe autonomous vehicle not only requires building robust technology, it requires building robust support and trust with passengers and regulators. Achieving this trust requires several key factors: 1) Industry collaboration between autonomous vehicle technology developers; 2) Transparency between autonomous vehicle operators, regulators, and the public at large; and finally, 3) Agreement across all stakeholders on an answer to the question How safe is safe? That is, creating a consensus among major industry players on safety standards for autonomous vehicles.
Safety First for Automated Driving
At Aptiv, we’re committed to leading the way toward a common definition of autonomous vehicle safety. On July 2, 2019, Aptiv was proud to co-release the first and most comprehensive blueprint for automated driving safety to date, entitled
Safety First for Automated Driving (SaFAD).
SaFAD is a blueprint for designing safe automated driving systems. Our Aptiv team worked alongside ten other global industry leaders, including BMW and Baidu, to publish SaFAD, which draws in decades of experience and broad expertise in automotive, mobility tech, safety, and regulation to articulate 12 guiding principles to guide development of safe autonomous vehicles. SaFAD’s 12 guiding principles are consistent with existing global regulatory guidance in the US, Germany, and China, and therefore represents a global development blueprint. The key objective of SaFAD is to enable development of autonomous vehicles, which will dramatically reduce the number of global road fatalities.
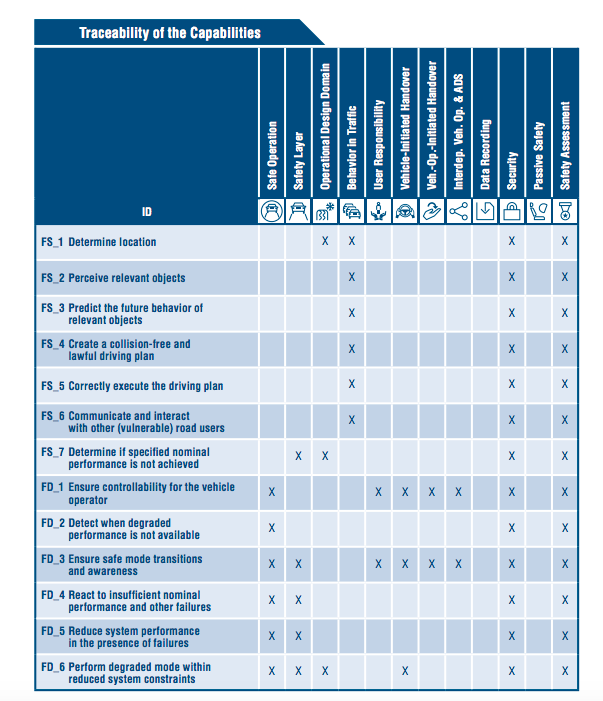
The SaFAD document pairs each guiding principle against critical autonomous vehicle design capabilities. If critical autonomous vehicle capabilities can be shown to meet the 12 principles, autonomous vehicle developers can be confident that
they are on the path toward creating a safe system.
As an example, consider the guiding principle behavior in traffic. This principle states that automated system behavior must be easy to understand and predictable for surrounding road users. It must therefore be shown that critical perception capabilities, such as sensor fusion, perform in a manner that is better than the average human driver when the automated system’s behavior in traffic—its driving behavior and interaction with external road users—is tested.
What’s next?Autonomous driving technology has evolved at a dramatic rate over the past several years. A wide range of development methodologies have been adopted by both established companies and a growing roster of new enterprises, resulting in widely
varying perspectives on safety. It’s our responsibility as an industry to come together to develop a unified definition of a safe automated system, and provide an industry-wide answer to the question: How safe is safe?
Aptiv’s mission is to develop safer, greener, and more connected solutions to enable the future of mobility, and we believe in the importance of safety above all. We look forward to additional industry leaders joining our mission
to collaborate on future updates of Safety First for Automated Driving.
.tmb-portrait.png?Culture=en&sfvrsn=17ed4d3e_3 "Karl Iagnemma")