¿Qué es la verdad fundamental?
A medida en que los sistemas avanzados de asistencia al conductor (ADAS, por su siglas en inglés) se encuentra un modelo ambiental que representa el mundo alrededor de un vehículo, basado en datos recopilados por sensores como radares, cámaras, radares Lidar y sensores ultrasónicos. A medida que los desarrolladores mejoran y refinan los modelos ambientales que generan esos sensores, necesitan saber con qué precisión los modelos representan el mundo real. Ese patrón oro se llama verdad fundamental.
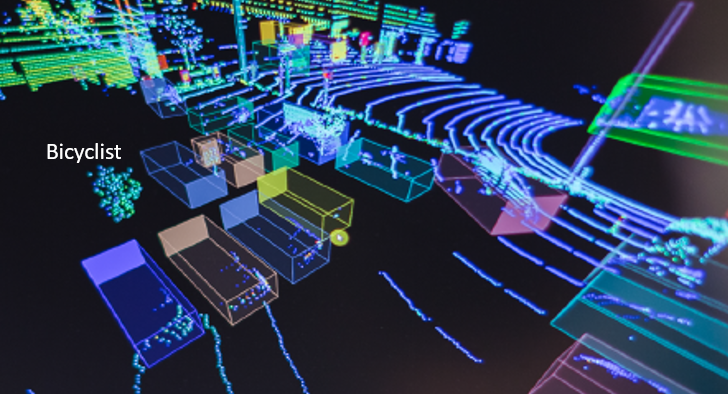
Por ejemplo, si hay un ciclista delante de un vehículo, los desarrolladores deben asegurarse de que los sensores detecten con precisión que un objeto está allí, determinar el alcance del objeto, medir el tamaño del objeto, medir la velocidad relativa de ese objeto. y clasifica ese objeto como una bicicleta.
El radar es excelente para detectar el alcance y la velocidad, con un buen rendimiento incluso en condiciones climáticas adversas, y los sistemas de radar avanzados también pueden determinar la elevación. Las cámaras son buenas para la detección de azimut y la clasificación de objetos, pero luchan con una detección de rango precisa. Para comenzar una evaluación completa del rendimiento de estos y otros sensores, primero tiene que haber una verdad básica que establezca la "respuesta correcta" para todas las preguntas que los sensores deben resolver.
Para registrar la verdad del terreno, los desarrolladores utilizan vehículos de prueba equipados con una variedad de dispositivos de medición inercial extremadamente sensibles, equipos GPS de alta precisión, radares Lidar y cámaras montadas en sus techos. Si bien estos sensores son demasiado costosos, voluminosos y poco prácticos para su uso en vehículos cotidianos, proporcionan una resolución muy alta en tiempo real para crear una representación muy precisa del entorno alrededor del vehículo de prueba.
Los desarrolladores conectan los sensores en los que están trabajando en el mismo vehículo, por lo que los sensores actuales en el vehículo y los sensores de desarrollo están alineados en el tiempo, operando en el mismo lugar con el mismo entorno y con las mismas entradas de datos potenciales. Los probadores conducen los vehículos en una amplia gama de escenarios, tanto en pistas de prueba cerradas como en vías públicas, y luego llevan los datos a un laboratorio para su análisis.
Debido al alto volumen de datos recopilados, los evaluadores los cargan en la nube para brindar más potencia de procesamiento y producir resultados reales en minutos. Esta información de verdad fundamental puede ayudar a los desarrolladores a extraer información más refinada de los datos brutos de los sensores a través de la inteligencia artificial y el aprendizaje automático.
Digamos, por ejemplo, que un automóvil cuenta con equipo de medición de la verdad terrestre y con el radar de prueba, y el radar detecta un objeto parcialmente oculto que el equipo de verdad terrestre identifica posteriormente como una bicicleta cuando la vista ya no está bloqueada. Luego, los desarrolladores usan esos datos para decirle al software de aprendizaje automático que el patrón no tan obvio detectado por el radar provenientes del objeto en esa ubicación representa a un ciclista. La próxima vez que el software encuentre un patrón similar, hay más posibilidades de que pueda detectar y clasificar ese tipo de objeto, identificando una bicicleta con mayor confianza y sin la ayuda de equipos de verdad.
Esta técnica ayuda a democratizar la seguridad. Al aplicar inteligencia de software a los sistemas de radar y otro hardware de sensores menos costoso, los OEM pueden mejorar y extender las funciones avanzadas de ADAS a más vehículos, más allá de los modelos premium.


{kind=link}
{kind=link}