¿Qué es un controlador de dominio?
En las aplicaciones de automoción, un controlador de dominio es una computadora que controla un conjunto de funciones del vehículo relacionadas con un área o dominio específico. Los dominios funcionales que requieren un controlador de dominio suelen ser de procesamiento intensivo y se conectan a un gran número de dispositivos de entrada/salida (I/O). Algunos ejemplos de dominios relevantes son la seguridad activa, la experiencia del usuario y la carrocería y el chasis.
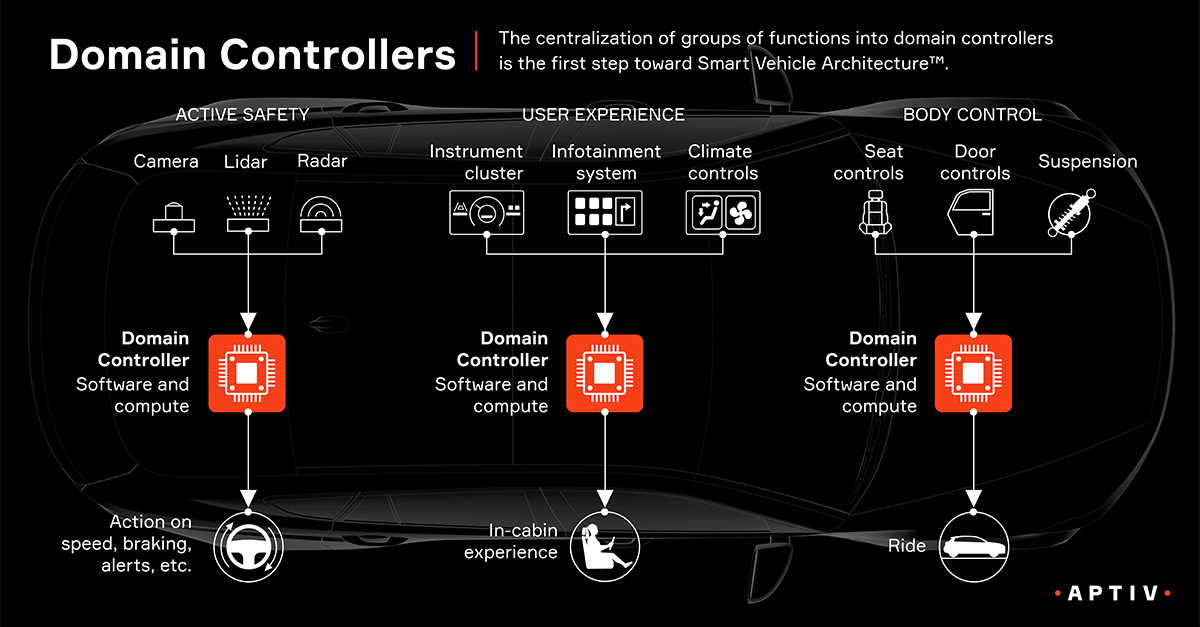
La centralización de las funciones en los controladores de dominio es el primer paso en la evolución de los vehículos hacia arquitecturas eléctricas/electrónicas avanzadas, como la Smart Vehicle Architecture™ de Aptiv.
Un controlador de dominio de seguridad activa recibe información de sensores alrededor del vehículo, como radares y cámaras, y utiliza esa información para crear un modelo del entorno circundante. A continuación, las aplicaciones de software del controlador de dominio toman decisiones de "política y planificación" sobre las acciones que debe realizar el vehículo, basándose en lo que muestra el modelo. Por ejemplo, el software puede interpretar que las imágenes enviadas por los sensores indican que un peatón está a punto de pisar la calle y, en función de políticas predeterminadas, hacer que el vehículo alerte al conductor o aplique los frenos.
En el ámbito de la experiencia del usuario, un controlador de dominio suele controlar múltiples elementos de la experiencia en cabina, por ejemplo, proporcionando el software y la potencia informática necesarios para hacer funcionar el sistema de infoentretenimiento, el grupo de conductores y otras interfaces del vehículo para el usuario. Estas interfaces se realizan cada vez más a través de pantallas dinámicas y reconfigurables, como una pantalla táctil que puede proporcionar navegación, controles de audio y funciones de climatización.
Un paso hacia el futuro
Los controladores de dominio representan un hito importante hacia vehículos más definidos por el software y la centralización.
Las funciones que antes se gestionaban a través de unidades de control electrónico (ECU) individuales pueden consolidarse, o integrarse, en controladores de dominio. Por ejemplo, el procesamiento de un radar podía realizarse anteriormente en una ECU autónoma; sin embargo, ese procesamiento podría trasladarse a un controlador de dominio de seguridad activa mediante un enfoque de Arquitectura Satélite o Satellite Architecture.
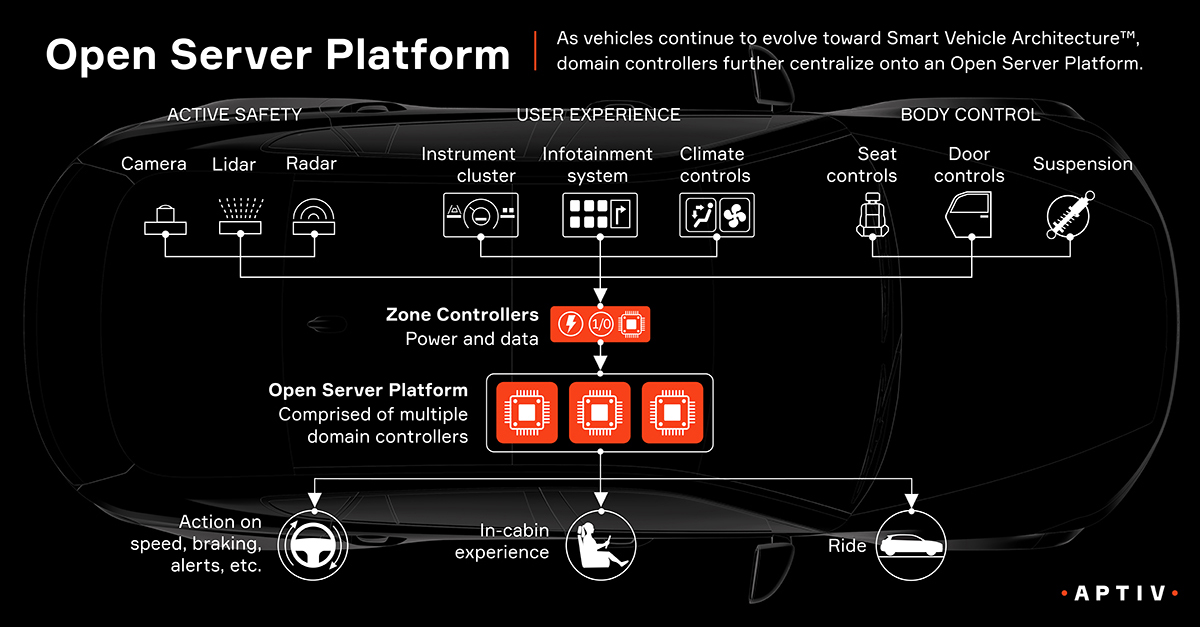
Los controladores de dominio se complementan con los controladores de zona. Los controladores de zona son nodos en el vehículo que sirven como centros de distribución de energía y conexión de datos. Gestionan la E/S con sensores, actuadores y periféricos, lo que abstrae la E/S del cálculo y libera a un controlador de dominio para que se centre en el software que realiza funciones de nivel superior.
Con el tiempo, los controladores de dominio se consolidarán aún más en controladores "serverizados". Con la E/S abstraída de la computación y una red de alta velocidad en su lugar, tiene sentido consolidar el software en los controladores de dominio en menos ordenadores capaces de compartir dinámicamente las cargas de trabajo entre los diferentes dominios. Esta centralización reducirá aún más los costos y el espacio, desbloqueará nuevas funcionalidades como la automatización de los controladores y facilitará la realización de actualizaciones del software. Este enfoque será posible a medida que el software se abstraiga cada vez más del hardware, un principio clave de la visión de la arquitectura de vehículos inteligentes (SVA™) de Aptiv. Con esa abstracción, los controladores multidominio pueden ser refundidos como una Plataforma de Servidor Abierta.
Una Plataforma de Servidor Abierta permite a los desarrolladores de los fabricantes de equipos originales, Aptiv y terceros aprobados, crear aplicaciones innovadoras y colaborar en la creación de software de formas nunca antes posibles. A medida que los vehículos ascienden en los niveles de la conducción automatizada y asumen más tareas de conducción, la computación potente, centralizada y con capacidad de fallo es cada vez más importante. Aptiv se anticipó a este cambio hacia la centralización hace más de 10 años y fue el primero en la industria en introducir un controlador de dominio para realizar esas tareas. Comprendemos los retos que conlleva el desarrollo de funciones de conducción de alto nivel, y nuestra visión única del cerebro y el sistema nervioso del vehículo nos permite anticipar eficazmente las necesidades de hardware y software que se avecinan.


{kind=link}
{kind=link}