Czym jest model otoczenia pojazdu?
Model otoczenia to cyfrowe odwzorowanie rzeczywistego świata na zewnątrz pojazdu. Obejmuje on elementy takie jak drogi, a także dostarcza informacji o obiektach, których należy unikać np. inne pojazdy, niechronieni użytkownicy ruchu drogowego czy krawężniki.
Aby stworzyć ten model, system percepcji pojazdu gromadzi informacje o otaczającym go świecie zewnętrznym za pomocą zainstalowanych czujników pokładowych, takich jak np. radar, kamery, lidar i czujniki ultradźwiękowe. Następnie, wykorzystując podejście znane jako fuzja czujników, system łączy te różnorodne dane wejściowe, równoważąc najlepsze elementy każdego z nich. W ten sposób tworzy możliwie najdokładniejsze odwzorowanie otoczenia. Dzięki precyzyjnemu modelowi otoczenia, zaawansowany system wspomagania kierowcy w pojeździe (ADAS) może podejmować skuteczniejsze działania, aby minimalizować skutki błędów ludzkich i zapobiegać wypadkom drogowym.
Wypadki drogowe wciąż stanowią poważny problem. Według Światowej Organizacji Zdrowia, każdego roku na całym świecie, traci w nich życie około 1,3 miliona ludzi, a kolejne 20 do 50 milionów odnosi obrażenia. Większości z tych zdarzeń można by zapobiec, ponieważ jak podaje Amerykańska Krajowa Administracja Bezpieczeństwa Ruchu Drogowego 94% z nich to efekt błędów ludzkich.
Czułe czujniki
Model otoczenia może dostarczyć systemom ADAS bardziej precyzyjny obraz przestrzeni wokół pojazdu niż kierowcy mogliby uzyskać wyłącznie za pomocą własnych zmysłów.
Radar może mierzyć, jak daleko znajdują się obiekty i jak szybko się poruszają. Natomiast kamery, wyposażone w megapikselowe przetworniki obrazu, mogą precyzyjnie określać położenie kątowe tych obiektów oraz odczytywać znaki drogowe. Połączenie obu czujników pozwala na klasyfikację obiektów jako pieszych, rowerzystów, pojazdy oraz inne istotne obiekty.
Część z tych funkcji mogą wykonywać również kierowcy, ale w przeciwieństwie do ludzi, czujniki nigdy nie mrugają i nigdy się nie rozpraszają. Ponadto systemy radarowe stanowią doskonałe wsparcie dla kierowców, ponieważ mogą rejestrować otoczenie zarówno w ciemności, jak i w świetle słonecznym. Są również znacznie bardziej odporne na niekorzystne warunki atmosferyczne, takie jak mgła czy dym. Czujniki pojazdu bez przerwy skanują otoczenie i dostarczają dane do modelu otoczenia, nawet jeśli uwaga kierowcy jest skierowana gdzie indziej.
Model otoczenia może istnieć dzięki uczeniu maszynowemu. Jest to obszar sztucznej inteligencji, który może być wykorzystywany do doskonalenia pracy czujników i zwiększania ich skuteczności. Przykładowo uczenie maszynowe redukuje ilość pomyłek radaru w wykrywaniu rowerów i motocykli o imponujące 70%.
Relacje z kierowcą
W miarę jak pojazdy przechodzą na wyższe poziomy automatyzacji, model otoczenia staje się kluczowym narzędziem w zarządzaniu przekazywaniem kontroli między kierowcą a zautomatyzowanym systemem.
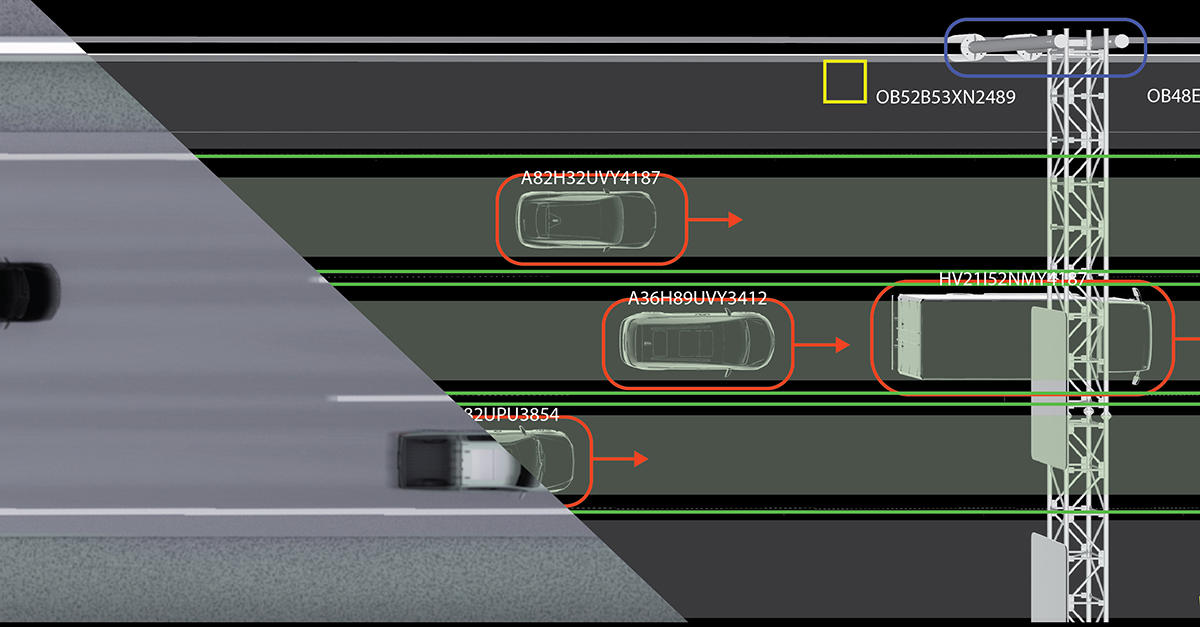
Działający w pojeździe zautomatyzowany system wykorzystuje informacje z modelu otoczenia i inne dane wejściowe, aby pomagać w identyfikacji obiektów wymagających szczególnej uwagi. Na przykład, jeśli jakiś pojazd wjechałby na pas ruchu tuż przed nami, system może go w widoczny sposób wyróżnić, wyświetlając wizualny znacznik, taki jak kolorowa ramka wokół pojazdu na wyświetlaczu head-up.
Krótko mówiąc, model otoczenia jest jednym z wielu istotnych elementów każdego zaawansowanego systemu bezpieczeństwa. Im bardziej precyzyjny i kompletny jest model, tym lepiej system będzie rozumiał, co dzieje się wokół pojazdu. Dzięki temu system może dużo pewniej podejmować działania, czy to ostrzegając kierowcę przed potencjalnymi zagrożeniami, automatycznie zmieniając pas ruchu czy też hamując w sytuacjach awaryjnych.

{kind=link}